
Figure 3.
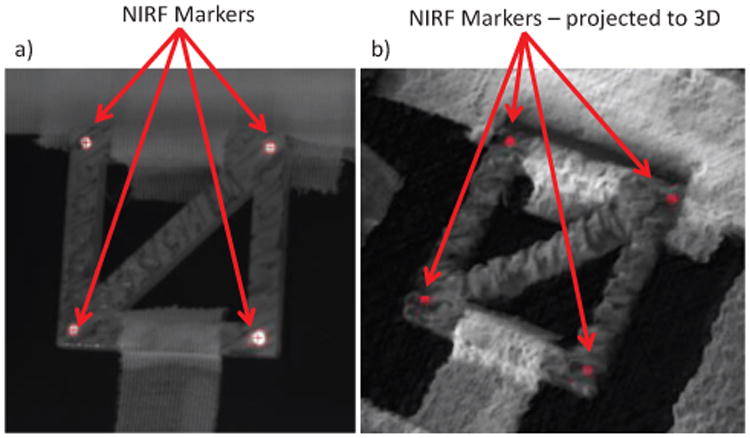
Showing a) NIR image with markers tracked by the ViSP library and their projection into co-registered 3D plenoptic camera point cloud in b). This projection follows the pipeline described in Fig. 2, and results in the 3D position of each tracked marker in metric coordinates.