
Fig. 8. Force Dependency.
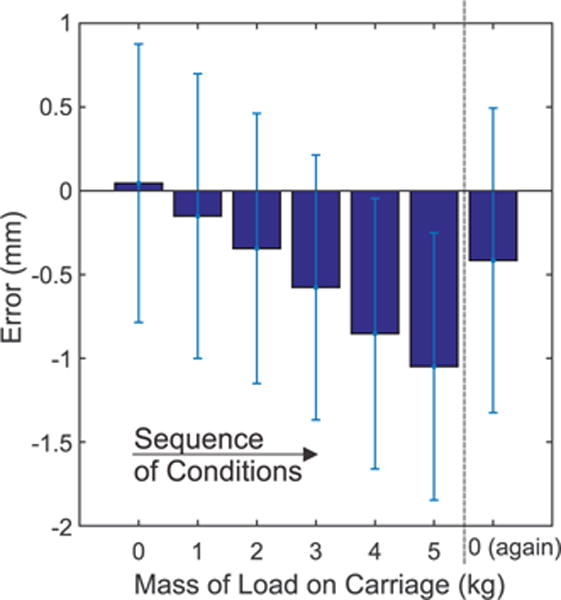
Increasing the load on the sliding carriage caused the inductance-based measurements to diverge slightly from the string-potentiometer readings. This is potentially due to compliance in the connections between the actuator (where the inductance of the Smart Braid is measured) and the sliding carriage (where the string potentiometer is attached). Shown are means of the error plus/minus a single standard deviation. When the load was removed, some bias remained.