
Fig. 9.
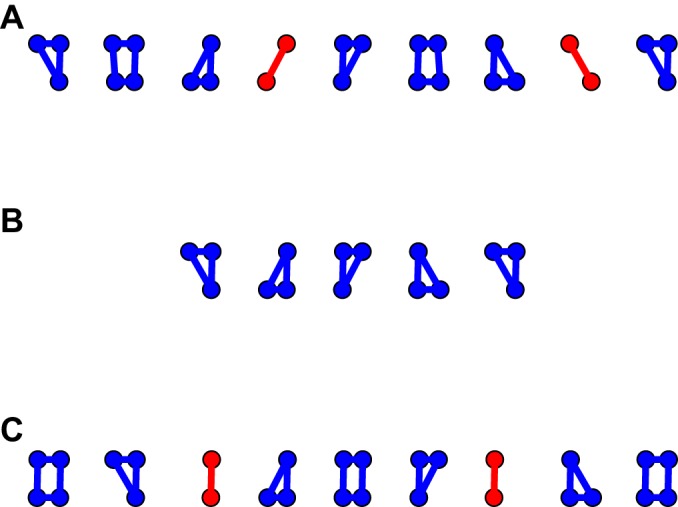
Mechanism by which a shift towards trot enhances quasi-static stability. Each row corresponds to footfall patterns associated with (A) a diagonal couplet walk, (B) the single-foot lateral sequence walk and (C) the lateral couplet walk (assuming a fixed duty cycle of 0.75). The single-foot lateral sequence walk is a walk in which footfalls are spaced evenly at one-quarter cycle apart, whilst the diagonal couplet walk has footfalls on ipsilateral legs more closely together, typically at 15% of a stride (and hence closer to pace, and further from trot; Hildebrand, 1968). Time evolves moving left to right across the footfall patterns, and the animal is walking from left to right across the page. The contact patterns have been separated horizontally to ease readability. As we move from bottom to top on the figure we move towards a more trot-like gait. Both the diagonal and lateral couplet walks are inferior in terms of quasi-static longitudinal stability to the single-foot walk because of the presence of the phases with only two limbs in ground contact (highlighted in red). However, for the lateral couplet walk, the pattern is especially unstable because for phases of the stride only contra-lateral pairs of limbs are in ground contact, leading to high pitch instability. For diagonal couplet walks, diagonal pairs of limbs are in contact during these unstable phases. As a result, while both these walks are longitudinally unstable, the lateral couplet walk is much more unstable.