
Figure 4.
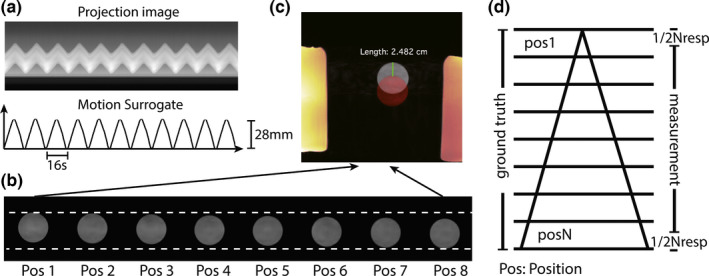
(a) the time series of projections and the derived motion surrogate; (b) the object in the 4D images (selected slice) has different locations; (c) images of the first and the last positions are color‐overlaid for motion amplitude measurement; (d) the motion amplitude measurement based on 4d‐mri has a system deviation of −1/Nresp with the ground truth for triangular‐shaped motion.