
Figure 6.
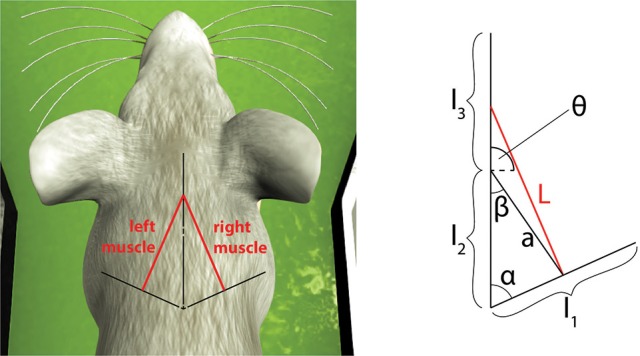
Simulated muscles for a symmetric three-link system and its application to the virtual mouse neck. The length of the muscle can be expressed as a function of the kinematic parameters of the three links and of the current two joint angles between them.