
Figure 4.
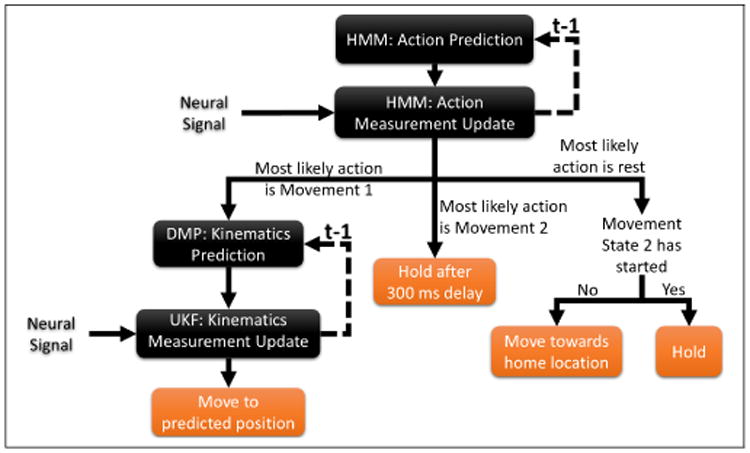
Flow diagram of the UKF-HMM algorithm. A prediction of the current action is first made based on the previous estimate of the action probabilities. This is then updated with the measurement of the neural signals, and the output is used to decide whether to move using the UKF, hold position, or rest. Dashed lines represent inputs from the previous time step.