
Figure 5.
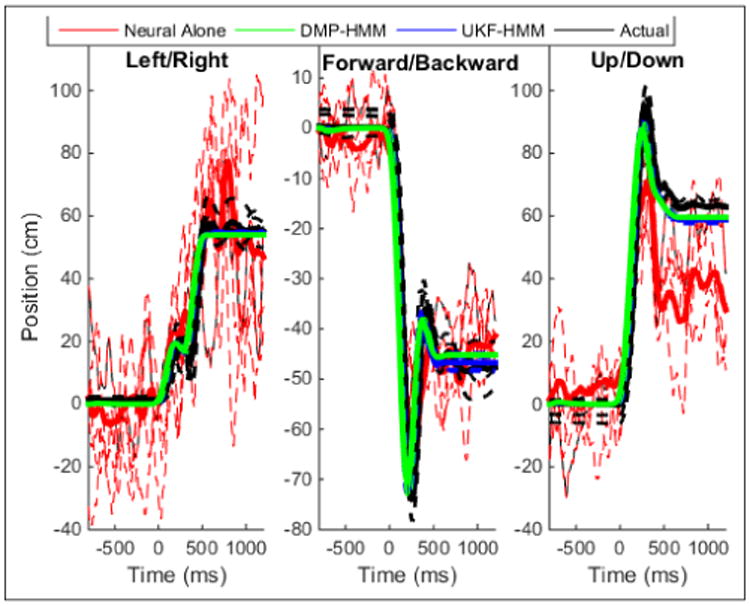
Example trajectories (position relative to home location) for an example object-location pair (push). Line color corresponds to the three dimensions being decoded. The dashed lines are single trials, and thick solid lines are the averaged across all trials for that object-location pair.