
Fig. 1.
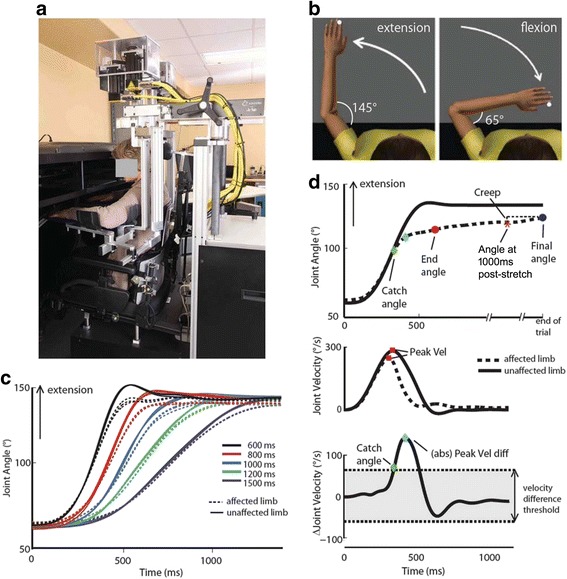
a Diagram of a participant seated at the KINARM robotic exoskeleton. b Schematic of Kinematic Assessment of Passive Stretch (KAPS) protocol. c Angular trajectory for an exemplar participant with stroke illustrating the consistency across the three trials for each movement duration (600, 800, 1000, 1200 and 1500 ms). d Parameter calculations (represented for 600 ms trial). Top trace: Catch angle (green diamond) is calculated as the first point in time where the velocity of the affected limb (dotted line) deviates from the nominal velocity from the unaffected limb (solid line). End angle is the angular position at the end of the movement. Final angle (blue circle) is the angular position at the end of the trial (2500–6000 after movement end). Creep was calculated as the difference between the elbow angle at 1000 ms after nominal movement duration (red star, Angle at 1000 ms post-stretch) and the Final angle. Middle trace: Peak velocity (red square) was calculated for both arms. Bottom trace: Peak velocity difference (blue diamond) was calculated as the peak of the absolute difference in velocity between the limbs. Velocity difference threshold (bottom trace, gray shaded area) was calculated based on the 99th percentile of healthy control performance. A catch angle was recorded only if the between-arm velocity difference for stroke participants exceeded the control velocity difference threshold