
Figure 3.
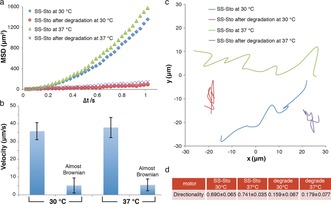
Motion evaluation of the redox‐sensitive stomatocyte nanomotor. a) MSD of redox‐sensitive nanomotors before and after degradation at different temperatures in the presence of H2O2. b) Velocity of redox‐sensitive nanomotors before and after degradation at different temperatures in the presence of H2O2. The respective velocities were calculated by fitting with MSD. The directional motion was fitted using the equation (4D)Δt+(v 2)(Δt 2), and the Brownian motion was fitted using the equation (4D)Δt. Error bars indicate the standard deviation of the velocity of 20 motors. c) Trajectories of redox‐sensitive nanomotors. d) Directionality of the movement of redox‐sensitive nanomotors as the average of 20 motors. SS‐Sto=redox‐sensitive nanomotor.