
Figure 1.
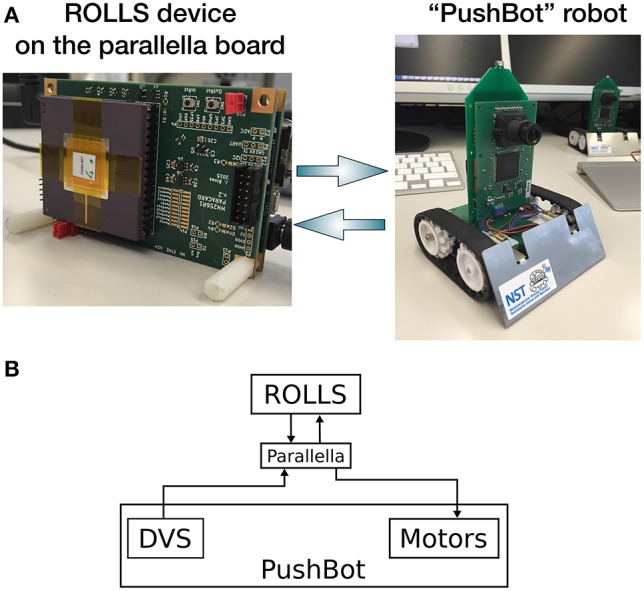
(A) Information flow between the three main components: ROLLS, Parallella, and the Pushbot, in particular, its sensor DVS and two motors. (B) The hardware setup used in this work: the neuromorphic processor ROLLS is interfaced to a miniature computer Parallella, which communicates with the Pushbot robot over a dedicated WiFi network.