
Fig. 1.
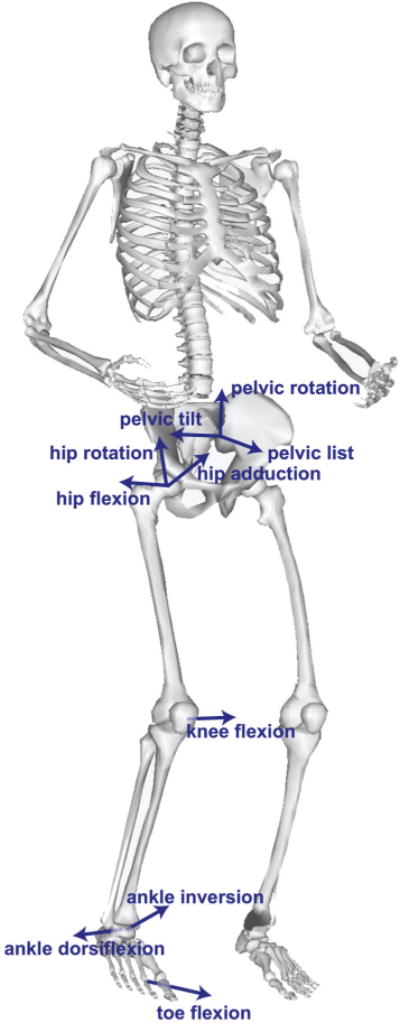
Rigid bodies and degrees of freedom in the model. The model was implemented in OpenSim with 22 rigid bodies representing the lower body (pelvis, and right and left femur, patella, tibia and fibula, talus, calcaneus (including the tarsal and metatarsal bones, and toes) and upper body (head and torso, and right and left humerus, ulna, radius, hand). There were seven degrees of freedom in each lower limb (labeled for the right limb), three rotational (labeled) and three translational (not labeled) degrees of freedom in the pelvis, and seventeen degrees of freedom in the upper body (not labeled).