
Fig. 3.
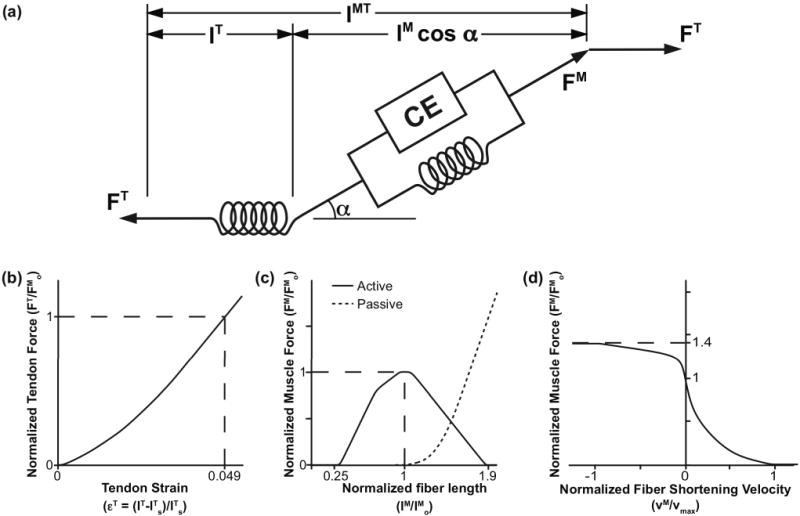
Computational model of muscle-tendon units. Muscles were represented as massless linear actuators with active and passive properties described by scalable generic force-length and force-velocity curves [42]. The generic curves were scaled by five muscle-specific parameters: maximum isometric force (FMo), tendon slack length (lTs), optimal fiber length (lMo), maximum fiber shortening velocity (vmax), and pennation angle at optimal fiber length (αo). (a) The total muscle-tendon length (lMT) was a function of the geometric pose of the model. The muscle fiber length (lM), muscle pennation angle (α), and tendon length (lT) were determined based on lMT, muscle activation, and the force equilibrium constraints between the muscle fiber (FM) and tendon (FT). (b) Tendon was modeled as a passive series elastic element whose normalized force (FT/FMo) was a function of tendon strain (εT). Tendon strain was calculated from the muscle-specific tendon slack length (lTs). We assumed a tendon strain (εT) of 4.9% [42] when the muscle developed maximum isometric force (Fom). (c) Muscle fiber was modeled as an active contractile element (CE) in parallel with a passive elastic element. Active isometric fiber force was a function of muscle activation (a) and fiber length normalized by optimal fiber length (lM/lMo). Passive fiber force was a function of normalized fiber length (lM/lMo) only. (d) Muscle active isometric fiber force was scaled based on fiber velocity (vM) normalized by maximum shortening velocity (vmax) of the muscle. Total muscle force was calculated as the sum of active and passive fiber force.