
Figure 3.
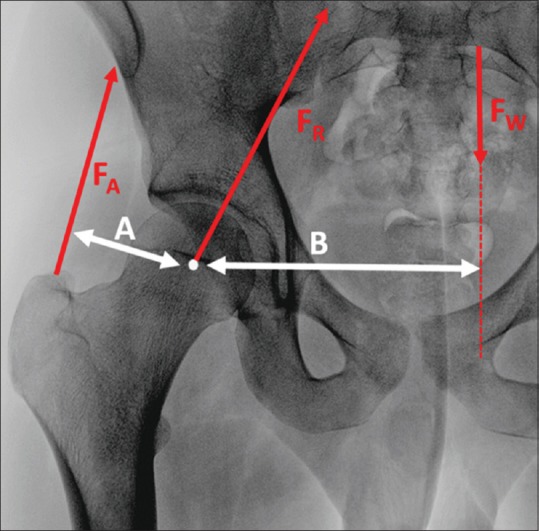
The static biomechanical model of unipodal stance during gait. The body weight vector (Fw), running perpendicular to the ground and originating from the center of mass, is counter balanced by the abductor force (FA). The magnitude of the bodyweight equals the bodyweight minus that of the weightbearing leg. The abductor force pulls along the trajectory of the gluteus medius/minimus muscle fibers. The bodyweight lever arm (B) is the perpendicular distance between the center of hip rotation and the bodyweight vector. As the center of mass moves laterally and the bodyweight increases, the abductor force will need to increase. The abductor lever arm (A) is the perpendicular distance between the center of hip rotation and the abductor force vector. If the abductor lever arm morphologically increases, the abductor force needed to counterbalance a given load decreases