
Fig. 2.
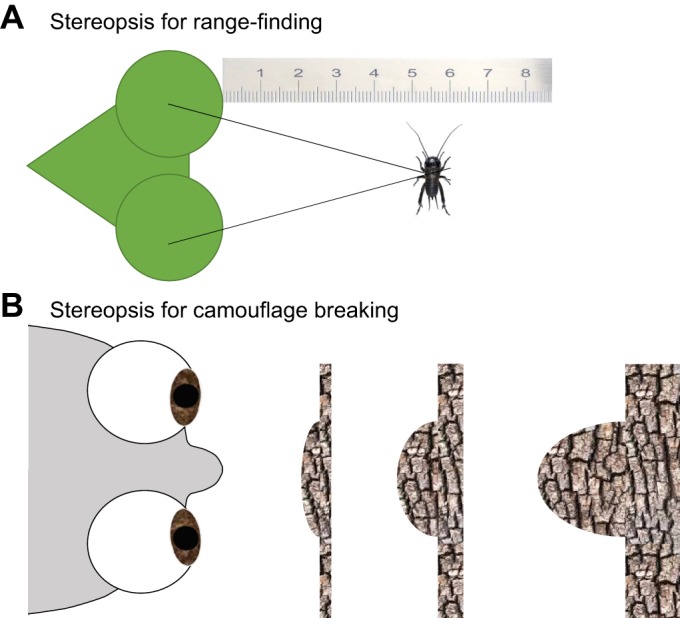
Two fundamentally different functions stereopsis could theoretically subserve. (A) Range-finding. Here, the intersection of lines of sight from the two eyes is used to derive the location of a viewed object in space; specifically, its metric distance from the observer. This requires knowledge of eye posture, and is thus more straightforward to implement in animals whose eyes are fixed in the head, such as the mantis shown. (B) Camouflage breaking. Here, stereopsis is used to derive the depth structure of a dense scene, say a beetle camouflaged against the bark of a tree. Calibration, including knowledge of eye posture, is required to obtain metric depth. Without this, the solution is ambiguous up to a relief transformation (Garding et al., 1995), so the distance of the tree and the shape of the beetle cannot be recovered (cf. the three example solutions shown). An uncalibrated stereo vision system can still detect the beetle as a bump on the surface, even though perfect camouflage would make it invisible monocularly.