
Fig. 3.
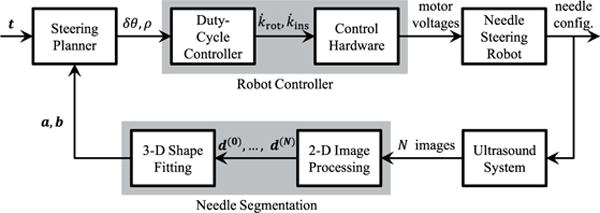
Block diagram of closed-loop control in ultrasound-guided needle steering. Automatic segmentation of the needle from 3-D ultrasound data provides feedback of needle configuration to a steering planner, which identifies the needle rotation and curvature necessary to reach a target point. A duty-cycle controller generates the velocity commands that allow motor control hardware to move the needle tip along the desired path to the target.