
Figure 2.
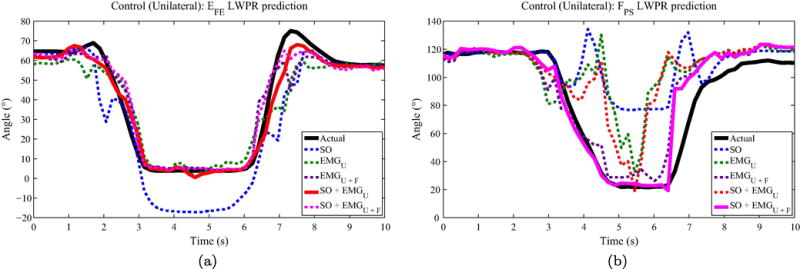
Control (unilateral) single-reach joint angle prediction. Example reach showing the performance of LWPR with different input feature sets for (a) EFE and (a) FPS. The actual joint angle trajectory is shown in a solid black line, while the best performing input feature set is shown with a solid colored line. The other feature sets are dashed.