
Fig. 3.
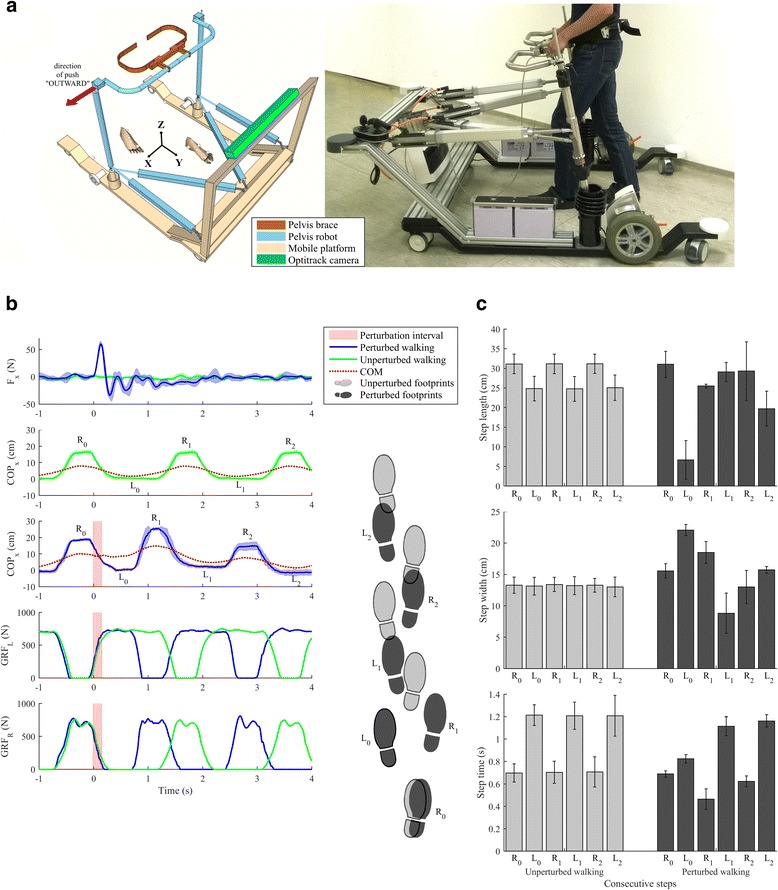
At the University rehabilitation institute, Ljubljana, Slovenia, we have developed a novel balance assessment robot (BAR). BAR is an admittance-controlled device that provides three actuated DOFs (sagittal and lateral pelvis displacements and rotation around vertical axis) while the remaining three DOFs (pelvic tilt, list and vertical displacement) are passive and spring loaded. BAR is placed on a mobile platform for over ground walking but can also be mounted onto an instrumented treadmill. Further details on BAR can be found in Olenšek et al. [37]. a shows schematics and a photograph of the actual system with indication of the “outward” perturbation direction. BAR can provide assistive force fields as well as apply perturbing pushes. In b a set of measurements are given illustrating unperturbed walking as well as balancing responses following a force impulse (50 N in duration of 150 ms) to a right-sided hemiparetic subject walking at 0.3 m/s (b-1). The push was delivered at the beginning of the stance phase of the non-impaired left leg and was directed to the right, i. e. »outward«. The applied push provoked movement of the COM to the right (b-3) as compared to unperturbed walking (b-2), the duration of the stance phase was significantly reduced (as indicated by the vertical GRFs – b-4 and 5) while the impaired right leg was placed more to the right (as compared to unperturbed walking) to enable adequate displacement of the COP in the lateral direction. c shows spatio-temporal characteristics of unperturbed and perturbed walking. The first bars in each graph sequence belong to a step that was completed prior to perturbation occurrence (from −1 s – 0 s) while the further five consecutive bars denote values for the steps following the commencement of the perturbation. Unperturbed walking is characterized by shorter steps that exhibit longer duration on the impaired side (right leg) compared to the unimpaired side (left leg). The perturbation is handled in the first step by substantially reduced step length and step time and increased step width of the first step. In the remaining steps, parameters gradually returned to those observed in unperturbed walking. All results show mean values and standard deviations of five individual trials. These results illustrate that well-defined perturbations and rather repeatable dynamic balancing responses can be obtained in neurologically impaired individuals. Thus, utilising the presented BAR robot to capture balancing responses in a form of COP, GRF, step lengths, step widths and step times before and after a therapeutic intervention can give objective assessment of each subject’s performance and efficacy of the applied rehabilitation