
Figure 3.
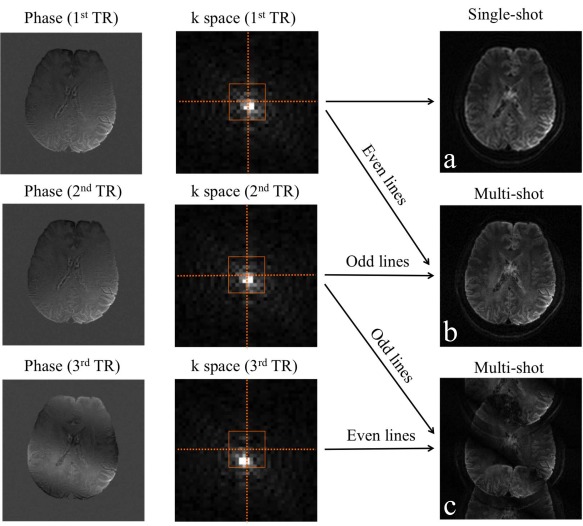
Subject motion during diffusion encoding can introduce substantial spatially varying phase to the data. For single‐shot EPI, this is not a problem, as only the magnitude is used and the phase is discarded (a). For multishot acquisition, however, this phase inconsistency must be properly handled. In this illustration, the subject is assumed to be steady during the first two TRs (no phase changes) and have a head rotation during the third TR, which introduces a linear phase offset (corresponding to a shift in k‐space). Multishot acquisition using even lines from the 1st TR and odd lines from the 2nd TR provides an artifact‐free image (b). Multishot acquisition using odd/even lines from the 2nd and the 3rd TRs in a similar manner suffers from substantial image corruption due to the shot‐to‐shot phase inconsistency (c). One solution to this problem is navigation, which measures the motion‐induced phase errors during each shot and correct them before combining all segments.