
Figure 1.
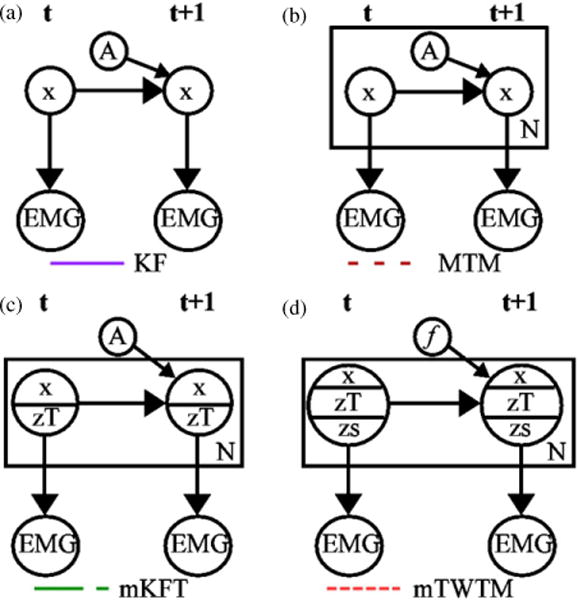
Graphical representation of the algorithm approaches: (a) the generic Kalman filter (KF); (b) mixture of trajectory models (MTM) (Yu et al 2007); (c) mixture of Kalman filters with targets (mKFT); (d) mixture of time-warped trajectory models (mTWTM).