
Figure 1.
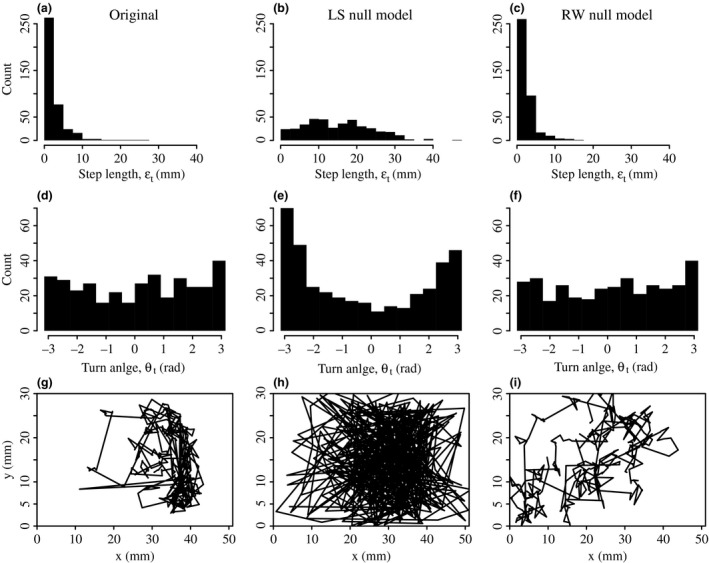
Producing unbiased synthetic ant trajectories. (a–c) The step‐length distributions is as follows: (a) ant 16 from colony 6, (b) a single realization of the Location‐shuffling null model, and (c) a single realization of the Random Walk null model. (d–f) The turn angle distributions. Notice that the LS null model does not preserve the shapes of either original distribution. (g–i) The trajectories corresponding to the original path, and the two null models. Notice the LS trajectory contains an over‐abundance of long‐range jumps and heading reversals, whereas the RW trajectory preserves the basic movement characteristics of the original.