
Figure 1.
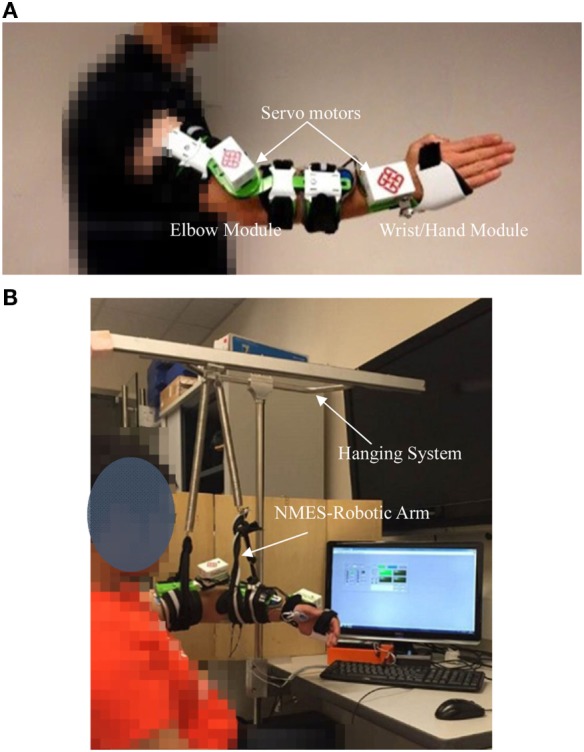
The experimental and training setup of the electromyography-driven neuromuscular electrical stimulation (NMES)-robot system: (A) the mechanical exoskeleton module of the system consisted of the wrist part and the elbow part; (B) the training setup in a session assisted with the NMES-robot training system, the visual feedback interface, and the hanging system.