
Figure 14.
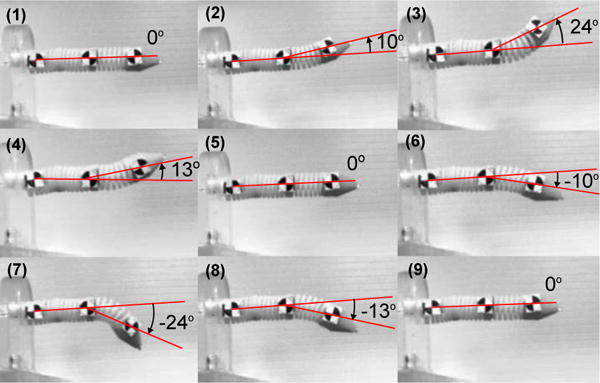
The end segment of MINIR-II robot moves back and forth under active cooling of SMA actuators (Base and middle segments were constrained). The red lines are superimposed in the figure for clarity.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
The end segment of MINIR-II robot moves back and forth under active cooling of SMA actuators (Base and middle segments were constrained). The red lines are superimposed in the figure for clarity.