
Fig. 9.
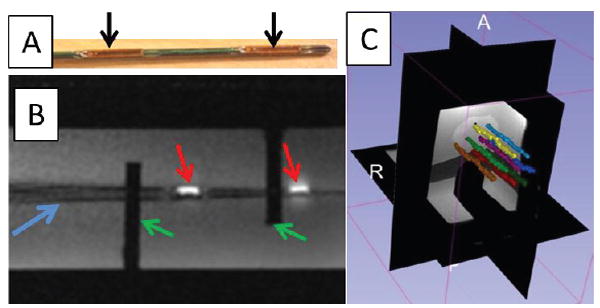
(a) Actively tracked stylet. Black arrows denote the micro-tracking coils; (b) MR image of the active tracking stylet within the custom-machined container acquired by two-dimensional gradient echo (2D-GRE). Red arrows denote the MR image of the micro tracking coils. Blue arrow denotes the image of the stylet. Green arrows denote the fixed structure of the container. (c) Screen shot of the 3D Slicer display during navigation. Eight needle trajectories were reconstructed during the stylet insertion/removal.