
Fig. 3.
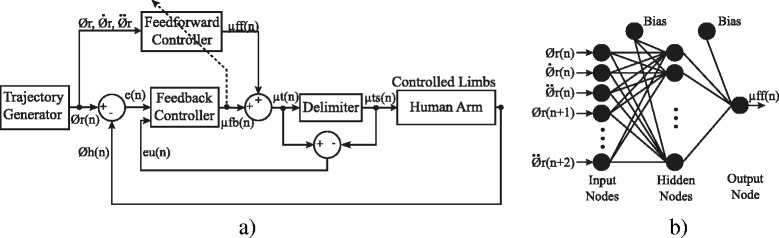
a Block diagram of the FES-based Feedback Error Learning (FEL) controller. b Artificial Neural Network used as feedforward loop. represent the desired angular position, velocity and acceleration respectively; Ø h is the measured position of the human arm; e(n) is the error position; μ ff, μ fb are the control signal generated for the feedback and feedforward controllers respectively; μ t is the total assistance; μ ts is the assistance at the output of the saturator; e u is the difference between μ ts and μ t