
Fig. 5.
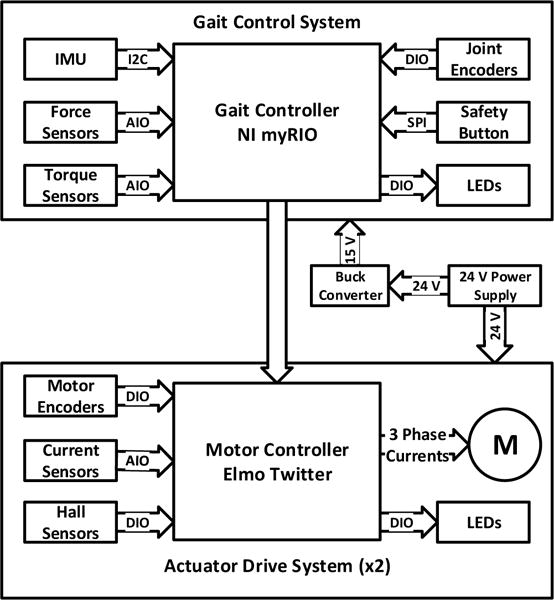
Block Diagram of Electrical System: The gait control system receives feedback related to the user’s gait and sends torque commands. The two actuator drive systems control and drive the knee and ankle actuators. A buck DC-DC converter provides power to the gait control system.