
Figure 1. Navigation within different spatial reference frames and spatial scales.
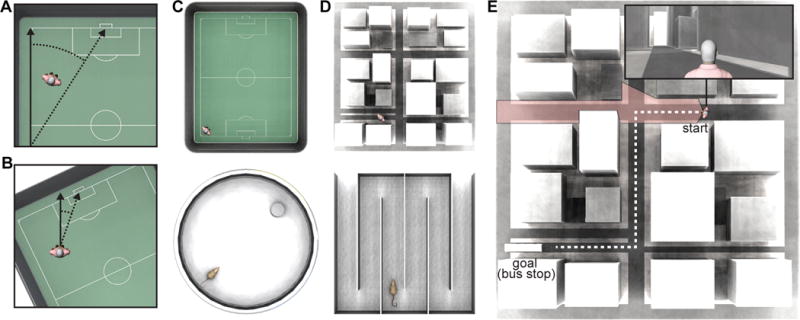
(A) An example of an Allocentric Reference Frame. Spatial information, such as the position of a landmark, is encoded with respect to other objects in the environment, i.e., the edge of the soccer field. The solid vertical arrow represents the allocentric reference direction that is fixed with respect to the dominant geometric boundary, and hatched lines represent the allocentric direction to other features in the space (e.g., the soccer goal). (B) An example of an Egocentric Reference Frame. The solid vertical arrow represents the egocentric reference direction, which is aligned to the orientation of the observer, and hatched lines denote the egocentric self-to-object distance and direction. (C) An example of a typical Vista Space for humans (top) and rats (bottom). Vista space refers to the space that is visible from a single location with little or no movement (Wolbers and Wiener, 2014). Both the person standing in the corner of the open soccer stadium and the rat performing the Morris Water Maze task have nearly full visual access to their surroundings. (D) An example of a typical Environmental Space for humans (top) and rats (bottom). Environmental space refers to large-scale spaces that require substantial movement or exploration to be sampled and comprehended. For humans city environments such as the example shown (top), or complex mazes with multiple hallways qualify as environmental spaces. In animal studies of navigation, multicompartment environments, such as the Hairpin Maze shown (bottom), would qualify as an environmental space. (E) The visual field of view is shown for an observer within an example environmental space. The pink shaded region represents the visual horizon for the observer. For any location within an environmental space the visual horizon is limited, requiring the navigator to move through multiple connected (vista) spaces and to integrate information over extended space and time to create a complete representation of that space. Furthermore, target locations may lie outside the sensory horizon, such as the bus stop in in the example shown, requiring the planning of more complex routes with multiple decision points.