
Fig. 7.
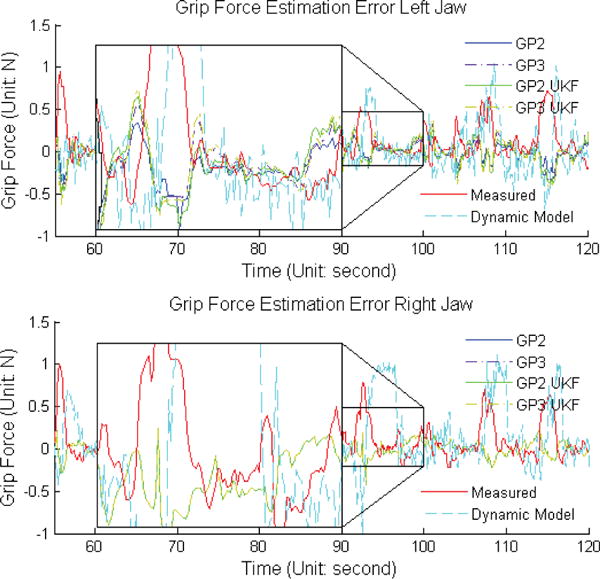
Sensor Measurement and Estimation Error Comparison. Ground truth (sensor measurements) is shown with force estimation errors. Vertical axis label for the red line is Grip Force and for rest of the lines, vertical axis is force error.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Sensor Measurement and Estimation Error Comparison. Ground truth (sensor measurements) is shown with force estimation errors. Vertical axis label for the red line is Grip Force and for rest of the lines, vertical axis is force error.