
Figure 3. The dynamics of the instability index for models with one driver mutation and many driver mutation.
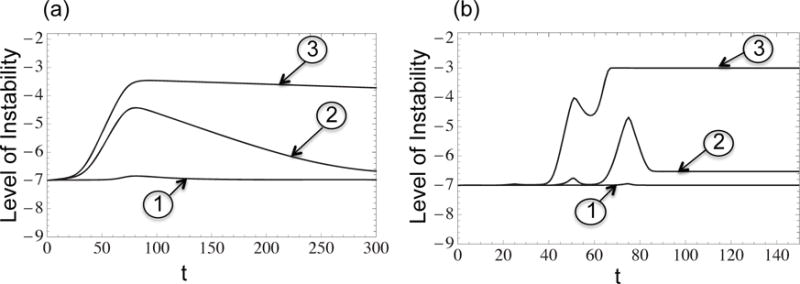
➀, ➁, ➂ correspond to the three cases in section 3.1. (a) One driver mutation model with quasispecies equations, radial mutation network: n = 3, a = 1.2, μ = 10−7, p0 = 10−7, p1 = 10−5, p2 = 10−3.5, p3 = 10−2, d0 = 10−4, d1 = 10−3, 10−2.5, 10−3.5, d2 = 10−1.5, 10−2, 10−3, d3 = 10−0.5, 10−2.5 for cases ➀, ➁, ➂ respectively. (b) Many driver mutation model with logistic growth equations, radial mutation network: n = 3, m = 6, , , , , ai = 1 + 0.05i, 0 ≤ i ≤ 6, μ = 10−7, p0 = 10−7, p1 = 10−5, p2 = 10−3, p3= 10−2, d0 = 10−4, d1 = 10−0.5, 10−1, d2 = 10−0.2, 10−0.3, 10−0.5, d3 =10−0.1, 10−0.15, 10−0.2, for cases ➀, ➁, ➂ respectively.