
Fig. 10.
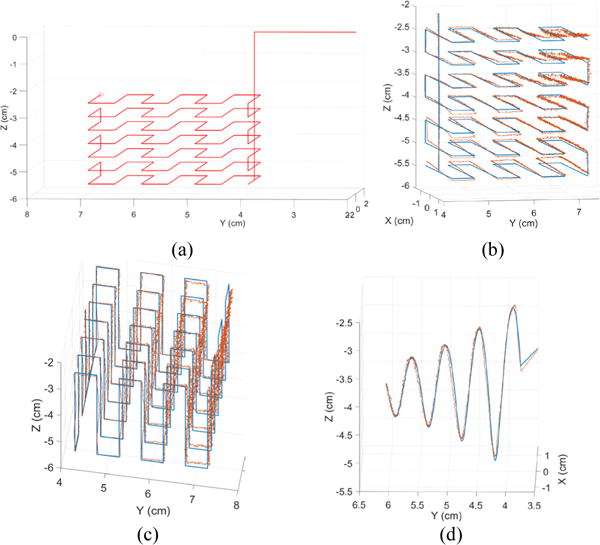
Target (red) and estimated (blue) 3D trajectories traversed by a magnetic tracer attached to a Cartesian robot. The calibration was performed on a reference trajectory (a) homogeneously sweeping a 3×3×3 cm3 cube with (b) overlapping estimated trajectories to visualize the localization error. A validation of the localization accuracy was carried out in (c) a trajectory traversing the same volume but through different points and (d) a twisting trajectory.