
Fig. 4.
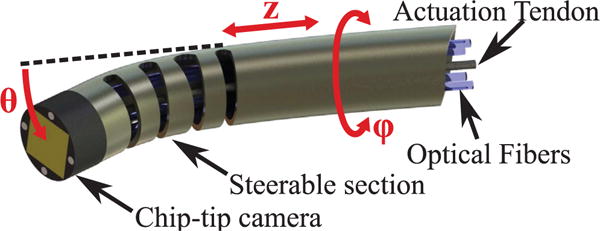
CAD rendering of the proposed miniature robotic endoscope concept. A chip-tip camera is placed on the distal tip of the steerable section. The robotic endoscope has three DoFs. The steerable section is a Nitinol tube containing cut-outs that cause it to bend (θ) as a single tendon attached to the tip is pulled. It can also translate (z) and rotate (ϕ) along its axis. The actuation tendon and camera wiring pass through the interior of the tube.