
Fig. 5.
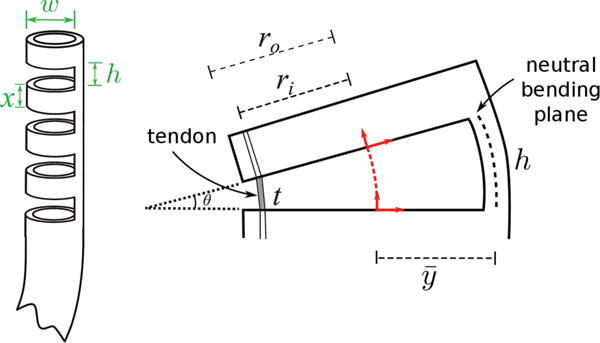
Flexure wrist concept: a number of cutouts are made in the body of a Nitinol tube, creating a compliant region that can be bent using a single tendon. Parameters w and h represent the cutout width and height, while x is the distance between two consecutive cutouts. These parameters plus the total number of cutouts n, determine the maximum bending angle of the wrist. The right figure illustrates the deflection of a single cutout element when the tendon is pulled. The variables ro and ri are the outer and inner diameter of the Nitinol tube, respectively. The angular deflection of a single section, θ, is determined by the height, h, the tendon length within the cutout, t, and the distance between the center of the tube and the neutral bending plane, .