
Fig. 1.
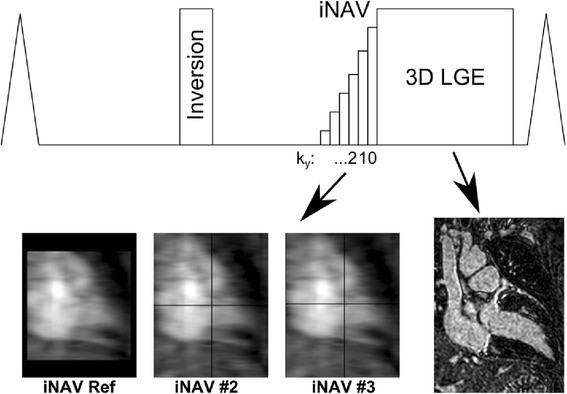
Pulse sequence diagram of image-navigated (iNAV)-3D late gadolinium enhancement (LGE) acquisition. The iNAV-3D was acquired during the ramp-up pulses of the LGE sequence, using a linear flip angle ramp and a high-low profile order. This means the higher ky lines were acquired first and ky = 0 acquired last to ensure that the centre line of k-space was acquired with the maximum flip angle and close temporal proximity to the 3D LGE acquisition. The first iNAV acquisition was used as a reference (iNAV Ref), and the local shim geometry used to automatically select the tracked region of interest which was registered to every subsequent iNAV (#2-#3) using normalized cross correlation. The registration results were displayed in real-time by overlaying crosshairs corresponding to the calculated motion onto the iNAVs. The registration provided translational motion estimation in foot-head and left-right direction for each 3D LGE k-space segment and motion correction was applied to the raw data as a linear phase shift. iNAV-3D LGE: Image-Navigated Late Gadolinium Enhancement