
Fig. 4.
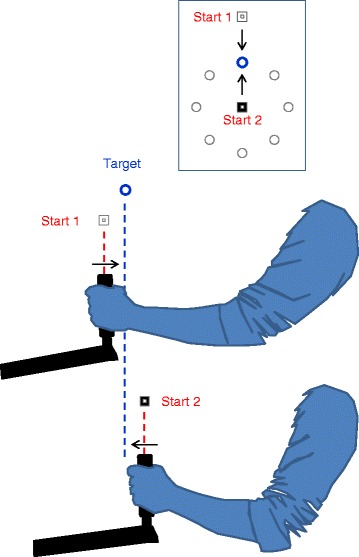
Example of arm postures at start location. Side view illustrations of the arm posture at the start location of the two reaching movements shown in Fig. 3. Both reaches are to same target location (90o; see inset). The start conditions are labelled by a small white and black square (see also Fig. 3). The arrows indicate the required movement direction. The upper start posture (‘start 1’; White Square), which corresponds to the left example in Fig. 2b and c, involves greater elbow extension. Thus, in the case of high elbow extensor tone (as for the participant in Fig. 3), holding the hand at that start position would lead to tension directed towards the target and to a fast rebound-like movement (in this example towards the target), after the release of the robotic hold. The bottom posture (‘start 2’; black square) corresponds to the right example in Fig. 3b and c. Here the reaching movement requires elbow extension. Hence, high elbow extensor muscle tone and weak elbow flexors would impede the movement. The illustrations are based on photographs of a healthy representative participant