
Figure 2.
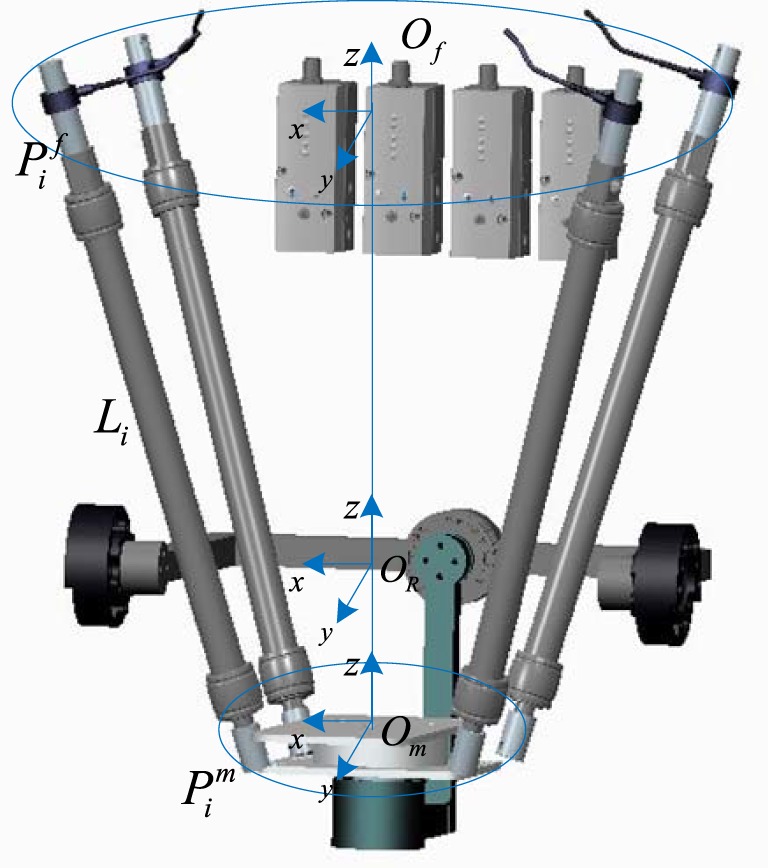
Geometric model the developed soft ankle rehabilitation robot (ARBOT). Define Of is coordinate of fixed platform and the rotation center of end effector is denoted by Om, and are the connection point vectors of the upper fixed platform and the lower moving platform, respectively.