
Figure 1.
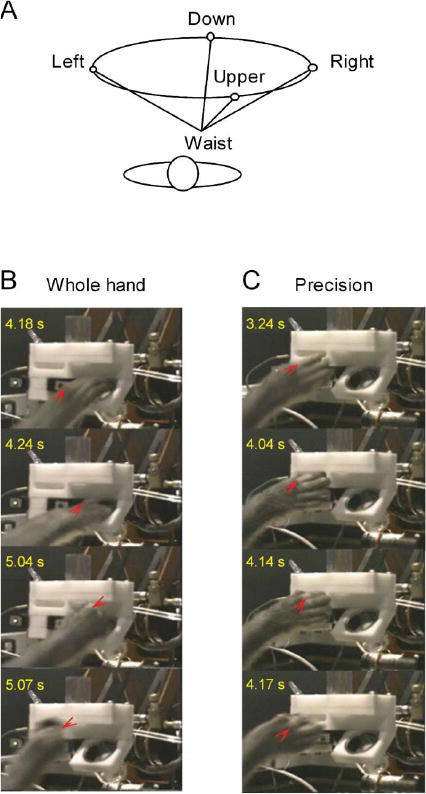
Reach-to-grasp task. A. Geometrically accurate 3-D top view of the target locations relative to the animal's waist and shoulders. Two target locations (left, and right) were at shoulder height at angles of 31° to the left and 28° to the right of the parasagittal plane through the shoulder. The other two target locations (up and down) were within the sagittal plane through the shoulder at angles of 56° above and 5° below the horizontal plane through the shoulder. B-C: Video frames showing the animal's hand during task performance. Red arrowheads point to the metacarpophalangeal (MCP) joint of the index finger. The whole-hand task required flexion of the interphalangeal (IP) and MCP joints to retrieve the cereal from the beaker. The precision task required flexion of the IP joints and extension of the MCP joints to retrieve the cereal from the horizontal slot.