
Fig. 3. Mechanical characterization of spin valves and angle reconstruction.
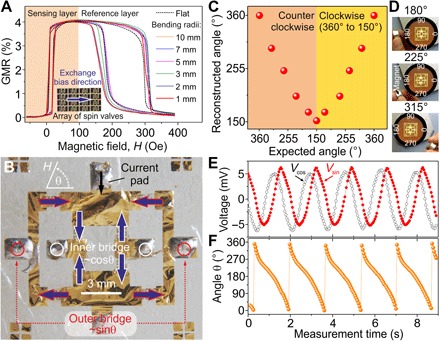
(A) GMR performance of an individual spin valve sensor. The magnetic field is applied along the EB direction. The sensor response (properties of the sensing layer, orange shaded region) does not change when the sensor is bent down to a radius of curvature of 1 mm. An array of spin valve sensors prepared on thermally stable polyimide-based ultrathin foils is shown as inset in (A). The EB direction is set in the same direction for all the sensors in the array. (B) Individual spin valve sensors are arranged with respect to their EB direction in two Wheatstone bridges each containing four spin valve sensors to realize a 2D magnetic field sensor. The response of the inner/outer Wheatstone bridge (indicated in white/red) is proportional to the cosine/sine of the angle θ between the bridge magnetization axis and the orientation of the external magnetic field, H. (C) Reconstruction of the magnetic field angle. The measurement is carried out using a 2D magnetic field sensor transferred to a rigid flat support (after being peeled off). (D) Geometry of the experiment: The signal of the Wheatstone bridges depends on the orientation of a permanent magnet. (E) Characterization of the 2D sensor. Voltage output signals of the inner (Vcos) and outer (Vsin) Wheatstone bridges of the 2D sensor. The period of the signals closely corresponds to the rotational speed set by the software (1.6 revolutions/s). There is a phase shift of 90° between the inner and outer bridge signals, which allows the reconstruction of the angle of the magnetic field (F).