
Figure 1.
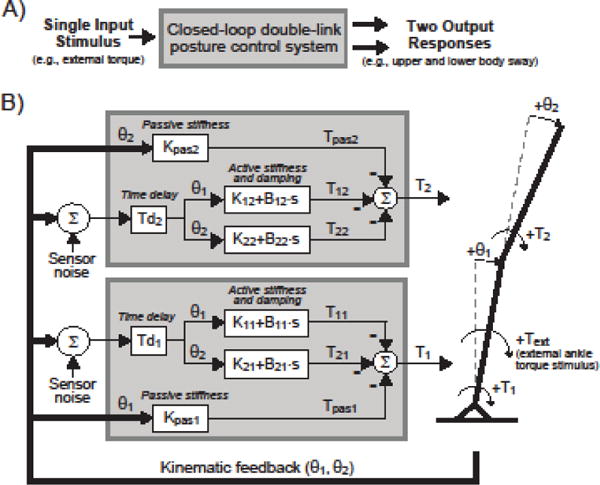
A) Schematic of a single-input multi-output system for closed loop posture control. B) Block diagram of the model used in the present study where a single external torque stimulus (Text) applied about the ankle joint evokes upper body sway (θ2) and lower body sway (θ1). Control is provided by generating corrective joint torques about the ankle (T1) and hip (T2) as a function of θ1 and θ2 scaled by stiffness and damping factors with time delay (for active control) and stiffness factors with no time delay (for passive control). Sensor noise is added to the kinematic feedback that contributes to active control to give simulation results with realistic sway variability. Note that the block diagram does not show torque components due to gravity and interactive torques due to body segment accelerations.