
Fig. 3.
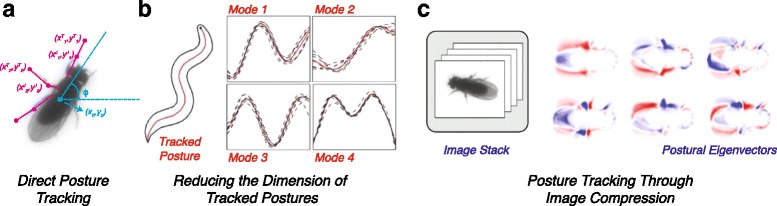
Examples of postural representations. a A schematic for how posture is typically represented by assigning body frame coordinates, here for a fruit fly. This assignment is usually created from manual tracking or machine vision techniques. b Using variations in the tracked centerline of the nematode C. elegans (left) to find a set of postural modes (right). Here, principal components analysis is used to find a set of postural modes, or “eigenworms,” where the original centerline can be largely reconstructed through a linear combination of these centerline variations (adapted from [54]). c In cases where tracking is not feasible due to occlusions, high-dimensionality, and/or large data sets, an alternative approach has been to use image compression to find postural modes, such as those seen in the fly images here (adapted from [53]). Here, red and blue represent positive and negative eigenvector magnitudes, respectively, that are the result of concentrating as much of the data’s variance in as few directions as possible. The original image can be reconstructed via a linear combination of all the modes plus an overall mean, and time series can be generated by observing sequential images’ projections onto these postural modes