
Figure 3.
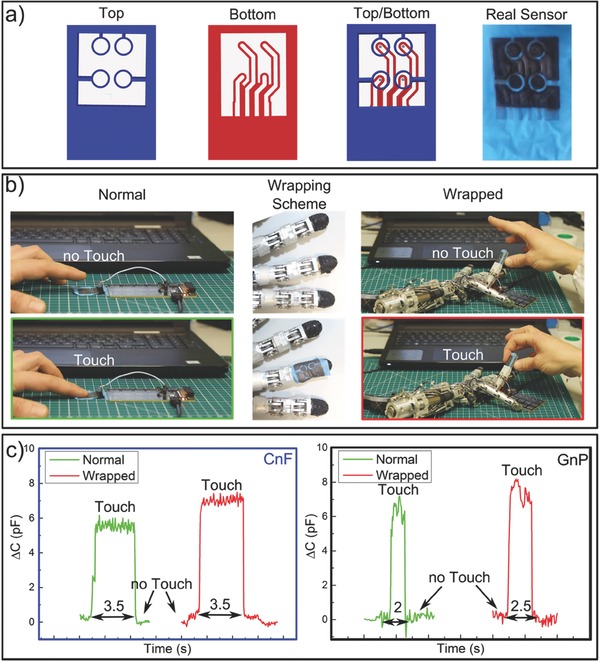
Proof of concept of the tactile sensor functioning in normal conditions and wrapped around a robotic hand finger. a) Scheme of the 3D printed shadow mask employed to pattern the sensor and photo of the top view of the real device; b) setup with the normal and the wrapped configuration; c) touch sensing output from the device unwrapped (green) and wrapped (red) for both CnF and GnPs.