
Figure 3.
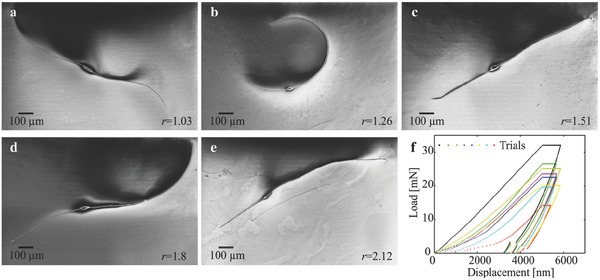
Five groups of two‐tailed microrobots are fabricated with tail length ratio r. a) r = 1.08 ± 0.08 (n = 6). b) r = 1.24 ± 0.11 (n = 6). c) r = 1.48 ± 0.08 (n = 6). d) r = 1.71 ± 0.09 (n = 6). e) r = 2.14 ± 0.16 (n = 6). Conditions: polymer concentration 25 wt% in DMF, weight ratio iron:polystyrene 1:2, electric field 25 kV, and flow rate 20 µL min−1 (see the Experimental Section). f) Load–displacement curves of the nanoindentation experiment are used to characterize the modulus of elasticity (see the Experimental Section). The modulus of elasticity of the microrobot is 0.58 ± 0.054 GPa (n = 8).