
Figure 5.
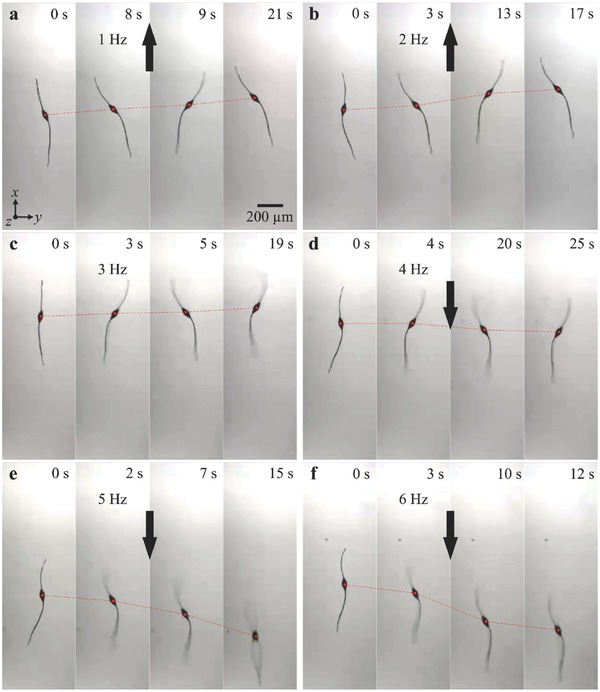
A two‐tailed microrobot with tail length ratio r ≃ 1.5 achieves planar flagellar propulsion along opposite directions using two actuating frequency ranges. a,b) At frequencies of 1 and 2 Hz, the long tail provides greater propulsive force and the microrobot swims at average speed of 8.1 and 19.1 µm s−1, respectively. c) Although the tails are not equal in length, they provide approximately equal propulsive force at 3 Hz and the speed of the microrobot is decreased to 3.9 µms−1. d–f) At frequencies of 4, 5, and 6 Hz, the short tail provides greater propulsive force and the microrobot reverses its direction and swims at average speed of −0.45, −9.7, and −35.2 µm s−1, respectively (Movie S2, Supporting Information).