
Figure 6.
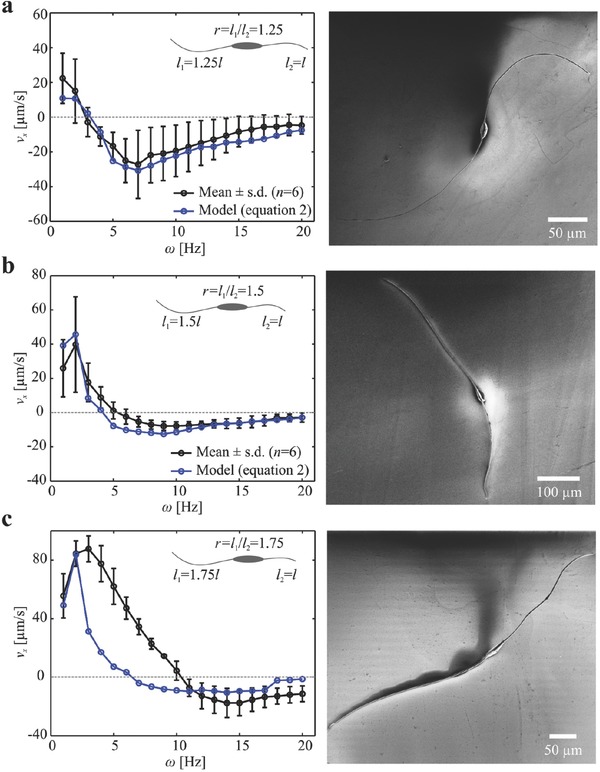
Frequency response of microrobots with different tail length ratio (r ≃ 1.25, r ≃ 1.5, and r ≃ 1.75). The reversal frequency varies with the tail length ratio of each microrobot. a) Microrobots with tail length ratio 1.25 ± 0.05 (n = 6) have reversal frequency of 2.8 ± 0.9 Hz (n = 6). b) Microrobots with tail length ratio 1.5 ± 0.08 (n = 6) have reversal frequency of 5.4 ± 0.7 Hz (n = 6). c) Microrobots with tail length ratio 1.75 ± 0.03 (n = 6) have reversal frequency of 10.4 ± 0.5 Hz (n = 6) (Movie S2, Supporting Information).