
Fig. 1.
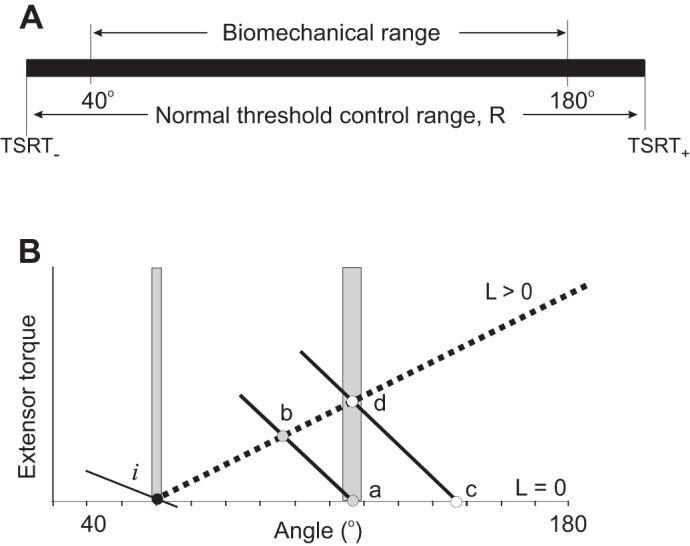
Threshold position control of movement adaptation to sudden changes in the load (schematic diagrams). A: the biomechanical range of the elbow joint is limited by flexion to ~40° (due to the soft tissue of the upper arm) and extension to 180° (due to bony approximation). The threshold position is the elbow angle (R) at which motoneurons begin to be activated and the tonic stretch reflex (TSRT) becomes functional. The range (TSRT−, TSRT+) is defined by the limits of central facilitation/inhibition of motoneurons and extends beyond the biomechanical range. B: elbow extension is accomplished by changing muscle activation thresholds, resulting in a shift of the torque/angle characteristic of the joint (left solid diagonal line) to the right with a possible increase in the slope (line ab). If movement is adapted to a zero load (L = 0), the equilibrium point (EP) of the joint is shifted from i to a, bringing the elbow position from the initial (left shaded bar) into the target window (right shaded bar). If a spring-like load is suddenly introduced (diagonal dotted line, L > 0), the same shift in the characteristic brings the joint to EP b, resulting in an undershoot positional error. To correct the error, the characteristic should be shifted further to the right to bring the joint to EP d and balance the load within the target window. This shift should be reproduced in the subsequent trials with the load to regain movement accuracy. However, if the loaded trial characteristic is reproduced when unexpectedly no load was presented in the upcoming trial, an overshoot error would occur (EP c). To correct the error, the subject would need to respecify the initial characteristic learned for the nonloaded condition to balance the load at EP a.