
Figure 1. Increased SABD loading drives increased flexion synergy expression.
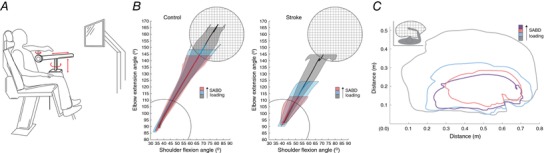
A, schematic representation of the ACT‐3D system, which allows free motion in three dimensions, can impose forces on its user, and enables dynamic quantification of flexion synergy expression. B, group‐averaged trajectories over the first 1 s of ballistic reaching for control (left) and stroke (right), depicted in joint angle space; control, N = 8; stroke, N = 10. This task was used for HD‐EEG and reaching experiments. Elbow and shoulder joint excursion were invariant to shoulder abduction loading in control participants, while excursion at both joints decreased monotonically as shoulder abduction loading increased post stroke. C, representative reaching work area data from a single stroke participant (upper limb FMA: 24/66). Across participants, work area (expressed as a percentage of on‐table area) averaged 69.5% in the Floating condition, 56.5% when lifting and producing 25% maximum voluntary shoulder abduction torque (25% SABD MVT), and 45.1% when lifting and producing 50% maximal voluntary shoulder abduction torque. B and C, decrease in elbow extension ability with increased shoulder abduction loading is the characteristic feature of flexion synergy expression. Grey: moving over a frictionless virtual table (Table); blue: limb fully supported by ACT‐3D, as if weightless (Floating); pink: generating 25% of maximum voluntary shoulder abduction torque; purple: generating 50% of maximum voluntary shoulder abduction torque. [Color figure can be viewed at http://wileyonlinelibrary.com]