
Figure 4.
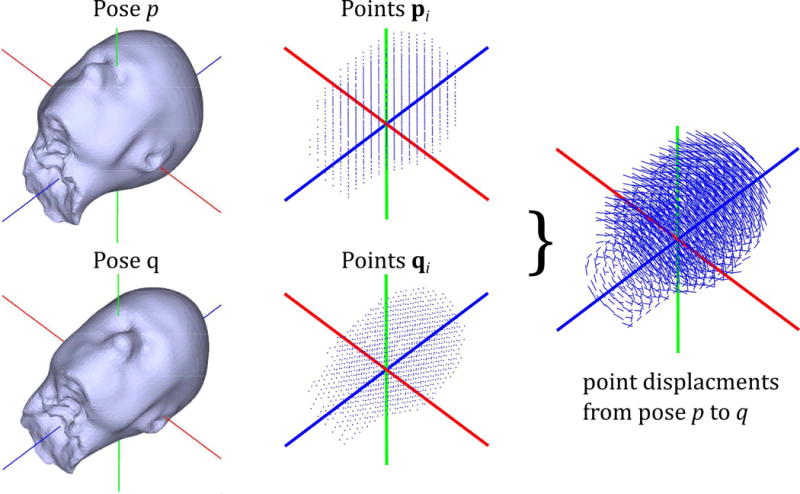
Simulation environment and ‘mean voxel displacement’ (MVD) calculation. Point clouds representing all n voxels inside the head model are used to calculate the mean voxel displacement (MVD) between consecutive time points (p and q, here). This is summed over the entire scan (see Fig. 5) to serve as a metric to quantify motion that occurred or remained uncorrected.