
Fig. 5. Application of kinesthetic illusory feedback within a bidirectional neural-machine-interface.
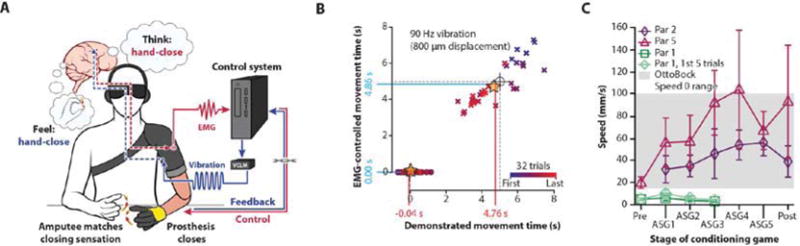
(A) Schematic representation of the movement feedback paired to a real-time functional prosthetic hand clinically fitted to the participant with illusory feedback locked to their volitional control, which was used to explore clinical feasibility. Feedback pathways are represented in blue (VCLM = Voice Coil Linear Motor). Prosthesis control pathways are represented in red (participant control). Participants matched the perceived sensation with their intact hand, and prosthetic hand closing speed was timed to the demonstrated perceptual illusion. (B) Graph showing the average start/stop times of the control signal (n = 32, EMG-activated prosthetic hand closing, blue) and the average start/stop times of the concurrently demonstrated percept movement (n = 32, matching hand, red) superimposed over the ideal start and thumb-index finger contact times of the physical prosthetic hand under continuous drive (black crosshairs, radius = 250 ms). The 5 s progression of movement from fully open to thumb-index finger contact for the physical prosthetic hand is our approximation of the participant’s demonstrated movement of the illusory percept (grey dashed lines). All events are plotted along time-linked axes. The raw matching hand movement start times (solid circles) and stop times (x’s) are colored according to relative position within the experimental timeline (first = blue, last = red). Gold stars = intersection of the average movement start and stop points for the EMG-control and the demonstrated movement. (C) Graph showing average percept speeds (n=30; error bars represent standard deviation) in Par 1, Par 2 and Par 5 measured before (Pre), after one, two, three, four and five conditioning games (ASG1-5) designed to increase percept speed (Fig. S8B,C), and after a washout period (Post). The grey area represents the range of hand close speed at the lowest speed setting in a common commercially available prosthetic hand (OttoBock Speed 0 Range).