
Figure 2.
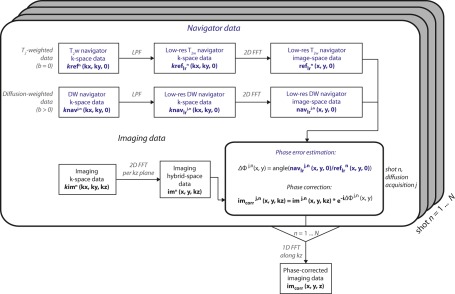
Phase correction and reconstruction in phase‐corrected DP 3D TSE. The phase error map Δϕ j,n (x, y) for each individual diffusion acquisition j and shot n is estimated from the low‐resolution navigator data in image space, where the T2‐weighted (b = 0) data are used as a reference. Phase correction per shot and per diffusion acquisition of the imaging data with the estimated phase error is done voxel‐wise in the hybrid space (x, y, kz). Corrected imaging data are then reconstructed along k z to obtain the final image. LPF, low‐pass filter; FFT, fast Fourier transform.