
Figure 1.
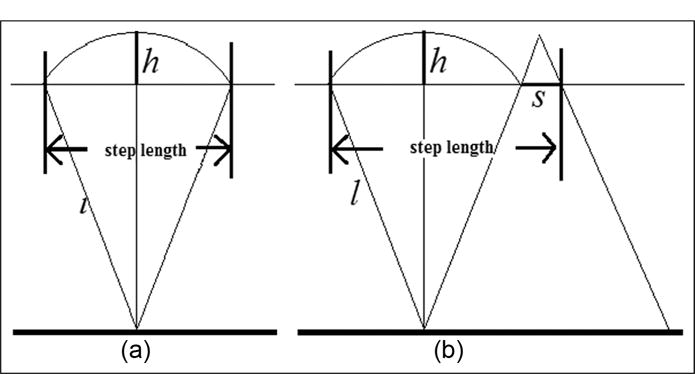
(a) Inverted pendulum model of the leg movement, where l is the leg length, h is the vertical displacement of the waist, and h is calculated by double integration of vertical acceleration. (b) Modified inverted pendulum to model walking, where S represents the foot length.