
Figure 1.
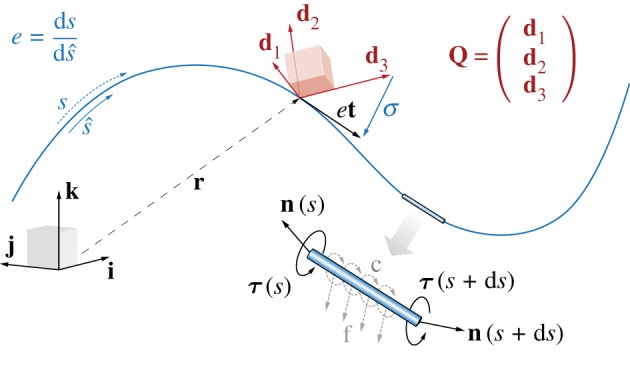
The Cosserat rod model. A filament deforming in the three-dimensional space is represented by a centre-line coordinate r and a material frame characterized by the orthonormal triad {d1,d2,d3}. The corresponding orthogonal rotation matrix Q with row entries d1, d2, d3 transforms a vector x from the laboratory canonical basis {i,j,k} to the material frame of reference {d1,d2,d3} so that and vice versa . If extension or compression is allowed, the current filament configuration arc-length s may no longer coincide with the rest reference arc-length . This is captured via the scalar dilatation field . Moreover, to account for shear we allow the triad {d1,d2,d3} to detach from the unit tangent vector t so that d3≠t (we recall that the condition d3=t and e=1 correspond to the Kirchhoff constraint for unshearable and inextensible rods, and implies that σ=et−d3=0). The dynamics of the centre line and the material frame is determined at each cross section by the internal force and torque resultants, n and τ. External loads are represented via the force f and couple c line densities.