
Fig. 2.
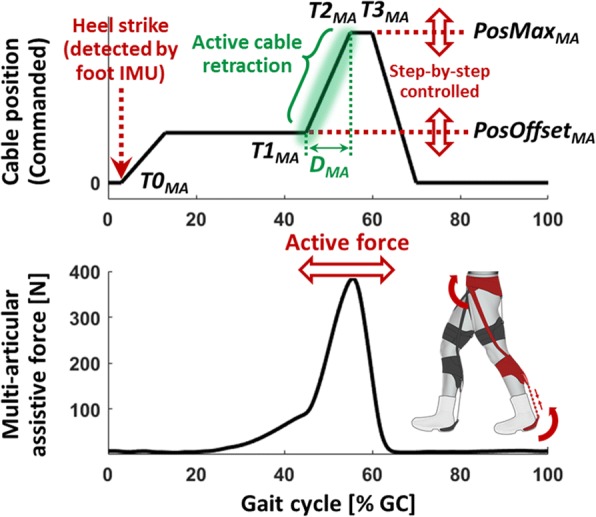
Representative data for the multi-articular controller: a Bowden cable position profile (top) and a resultant assistive force profile (bottom). The multi-articular assistance starts from the heel strike detected by the foot IMU, and delivers the majority of assistance during push off. The active cable retraction phase (highlighted in green) was parameterized into T1MA and DMA (T2MA - T1MA), and these parameters were customized by the augmentation-power-based control parameter tuning method